Project Overview
Proprio Vision's main goal was deliver better outcomes for the patient. Less radiation, small insurance bill and quicker surgery.
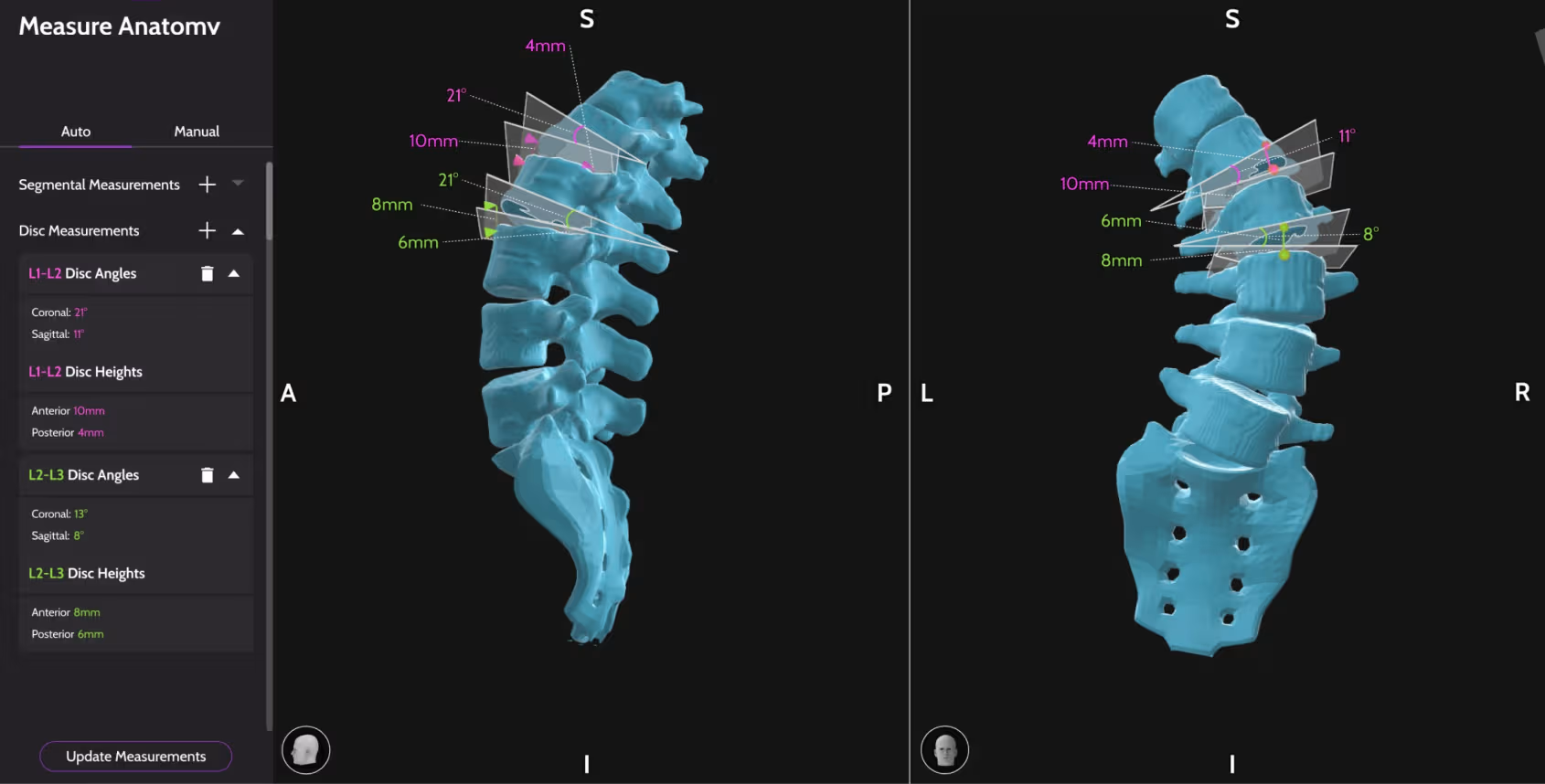
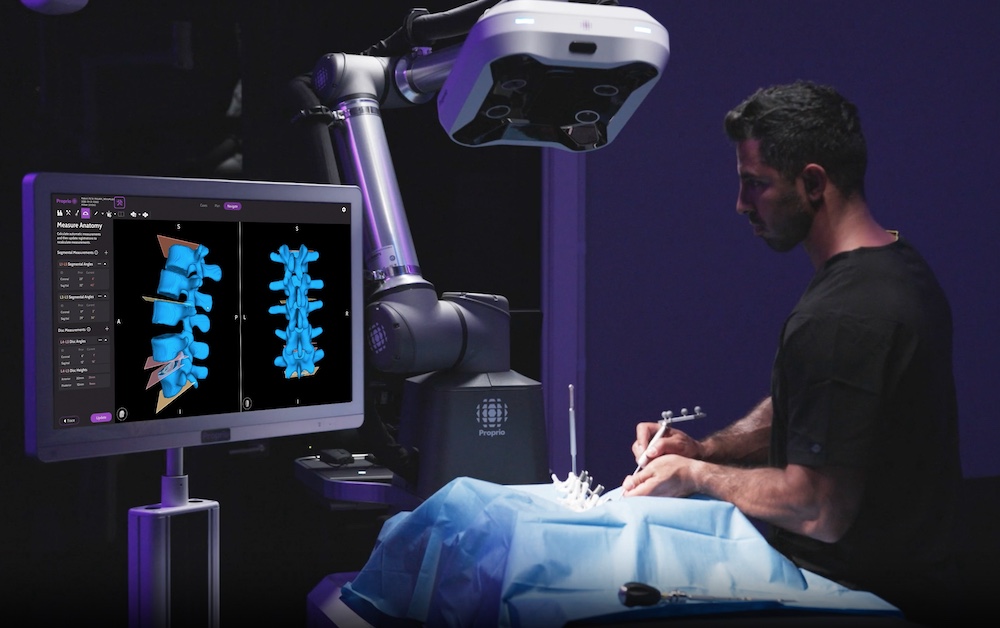
We achieved this by developing the Paradigm System. Using many cameras, sensors and tracked instruments we were able to replicate the real world that was happening on the table in 3D space. Giving surgeon a clearer look into the patient. Utilizing this ability we developed the first of it's kind, Intra-Op Measurements. Getting real time alignment data without radiation and large amount of time that it would be to gather that information.
My Contributions
To begin my journey at Proprio, the Front-End team was in the midst of a large, multi-year refactoring effort of the entire legacy codebase. I joined to help accelerate that work to the finish line. Within just under six months, I quickly onboarded, took ownership of my learning, and became a key contributor to the Front-End team.
After the refactor was completed, I was trusted to architect and fully implement the User Interface and User Experience for the next major feature. Intra-Op Measurements is the flagship feature of the Paradigm system, and I was confident in my ability to rise to the scale of the challenge ahead. I hosted demos for surgeons and stakeholders, collaborated closely with designers, and assisted with user studies and formative evaluations. Together, we achieved our goal of becoming the first to measure alignment without the need for radiation.
Once the primary development cycle for Intra-Op Measurements concluded, I had the opportunity to do it all over again with our next feature. Marketed as Picasso, this initiative focused on improving surgical workflow while reducing reliance on the technician operating the device. We introduced a foot switch that enabled surgeons to perform actions independently, streamlined the registration workflow, and reduced required communication, resulting in a smoother, more efficient experience.